



💡 Resumen (TL;DR):
- Investigadores de Singapur crearon OstraBot, un autómata acuático operado por células musculares reales.
- Alcanzó una velocidad inédita de 467 mm/min mediante un método de autoentrenamiento mecánico.
- El hardware del futuro usará materiales biodegradables para sensores ambientales e implantes médicos.
Un equipo de la Universidad Nacional de Singapur (NUS) desarrolló a OstraBot, un robot biohíbrido nadador que opera con tejido muscular cultivado en laboratorio y que acaba de convertirse en el modelo esquelético más rápido del mundo.
La investigación, publicada el 18 de marzo en Nature Communications, detalla cómo el dispositivo alcanzó una velocidad de nado de 467 milímetros por minuto. Esta cifra supera por tres a cualquier sistema equipado con músculos cultivados de forma convencional.
El secreto radica en un método de autoentrenamiento que no requiere intervención humana ni equipo externo. Las células del músculo esquelético joven se contraen espontáneamente al madurar. En lugar de ignorar esto, el equipo dirigido por el profesor asistente Tan Yu Jun utilizó las contracciones como una rutina de ejercicio integrada.
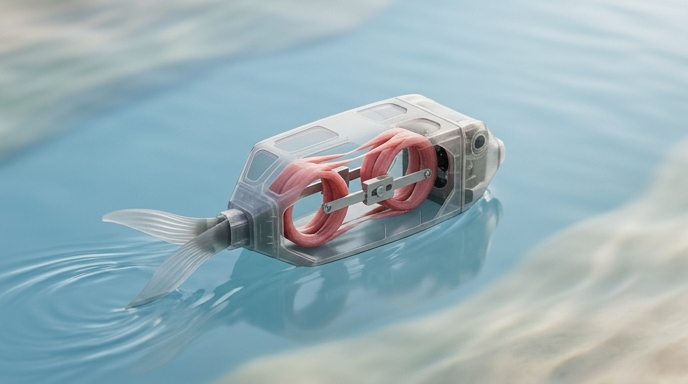
Los científicos diseñaron una plataforma mecánica que une dos anillos de tejido muscular mediante un bloque deslizante. Cuando un tejido se contrae, estira al otro, obligándolo a contraerse de vuelta.
Este ciclo constante generó músculos capaces de producir una fuerza máxima de 7.05 milinewtons y una tensión de 8.51 milinewtons por milímetro cuadrado, los valores más altos jamás registrados para la línea celular C2C12 en robótica biohíbrida.
“El propósito de este estudio no fue solo construir un robot más rápido, sino eliminar un cuello de botella fundamental en el campo y abrir la puerta a sistemas biohíbridos de alto rendimiento diseñados con la sostenibilidad en mente”, explicó Tan.
Diseño biomimético y control sónico
OstraBot basa su anatomía en el pez cofre. Emplea un solo anillo muscular entrenado acoplado a dos colas flexibles, mientras mantiene un cuerpo rígido para impulsarse en el agua.
Para maximizar el rendimiento, los desarrolladores crearon un modelo fisiológico que optimiza la rigidez del tendón y la respuesta física. Las pruebas arrojaron características precisas:
- Estimulación calibrada: El robot alcanza su velocidad máxima operando a una frecuencia de 3 Hz.
- Controles eléctricos: El ritmo de nado se ajusta directamente modificando la intensidad del campo eléctrico.
- Comandos acústicos: Un sistema integrado permite iniciar y detener el nado respondiendo al sonido de aplausos.
El equipo de la NUS trabaja actualmente en reemplazar todos los componentes estructurales de OstraBot por opciones completamente biodegradables.
El objetivo final apunta al despliegue de sensores ambientales en arrecifes de coral o la creación de herramientas médicas temporales que se disuelvan dentro del cuerpo humano tras cumplir su función.
“En última instancia, nuestro objetivo es desarrollar máquinas biohíbridas que no solo sean de alto rendimiento, sino también responsables con el medio ambiente por diseño”, concluyó Tan.


